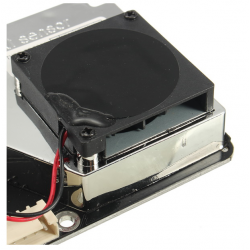
Descripcion:
El SDS011 usando el principio de la dispersión del laser, puede conseguir la concentración de la partícula entre 0.3 a 10um en el aire.
Con la salida digital y el ventilador incorporado es estable y confiable.
Características:
1. Seguro y confiable: detección del laser, estable, buena consistencia;
2. Respuesta rápida: el tiempo de respuesta es menos de 10 segundos cuando la escena cambia;
3. Fácil integración: La salida de UART (o salida de IO se puede modificar para requisitos particulares), ventilador incorporado;
4. Alta resolución: resolución de 0.3ug / m3.
Ámbito de aplicación:
PM2.5 Detector
Purificador
Intercambiadores de aire
Sistema de filtrado
Principio de funcionamiento:
Uso del principio de dispersión láser:
La dispersión de la luz puede ser inducida cuando las partículas pasan por el área de detección.
La luz dispersada se transforma en señales eléctricas y estas señales se amplifican y procesan.
El número y el diámetro de las partículas se pueden obtener por análisis porque la forma de onda de la señal tiene ciertas relaciones con el diámetro de las partículas.
Parámetros técnicos:
1 Medición de la salida: PM2,5, PM10
2 Distancia: 0,0-999,9 ug / m3
3 Tensión de alimentación: 5V
4 Máxima corriente de trabajo: 100mA
5 Corriente de reposo: 2 mA
6 Rango de temperatura de funcionamiento: -20-50 ℃
7 Tiempo de respuesta: 1s
8 Frecuencia de salida de datos en serie: 1 time/s
9 Resolución del diámetro de partícula: Menos de 0.3um
10 Error relativo: 10%
11 Tamaño del producto: 71x70x23mm
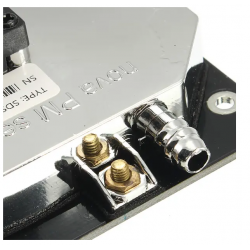
Especificación de interfaz:
CTL: Pasador de control, reservado
1um: > Concentración de partículas de 0,3 micrones, salida PWM
5V: 5V entrada de alimentación
25um: > Concentración de partículas de 2,5 micrones, salida PWM
Tierra: Tierra
R: Receptor de puerto serie RX
T: Transmisión de puerto serie TXPS: El tono de Interfaz es 2.54mm
Protocolo de comunicación:
Protocolo de comunicación serie: 9600 8N1. (Velocidad de 9600, bits de datos 8, paridad ninguno, bits de parada 1)
Ciclo de comunicación del informe en serie: 1 + 0,5 segundos
Marco de datos (10 bytes): encabezado de mensaje + orden + datos (6 bytes) + suma de comprobación + remolque de mensaje
0 Encabezado de mensaje: Automóvil club británico
1 orden: C0
2 Datos 1: PM2.5 byte bajo
3 Datos 2: Alto byte PM2.5
4 Datos 3: PM10 byte bajo
5 Datos 4: PM10 alto byte
6 Datos 5: 0 (reservado)
7 Datos 6: 0 (reservado)
8 Suma de comprobación: Suma de comprobación
9 Remolque de mensajes: AB
Suma de comprobación: datos 1 + datos 2 + ... + datos 6
Contenido de los datos PM2.5: PM2.5 (ug / m3) = ((PM2.5 byte alto * 256) + PM2.5 byte bajo) / 10
Contenido de los datos PM10: PM10 (ug / m3) = ((byte alto PM10 * 256) + byte bajo PM10) / 10
Contenido:
1 x Sensor de particulas de polvo laser NOVA PM SDS011