- ¡En oferta!
- -L72.00













Descripción:
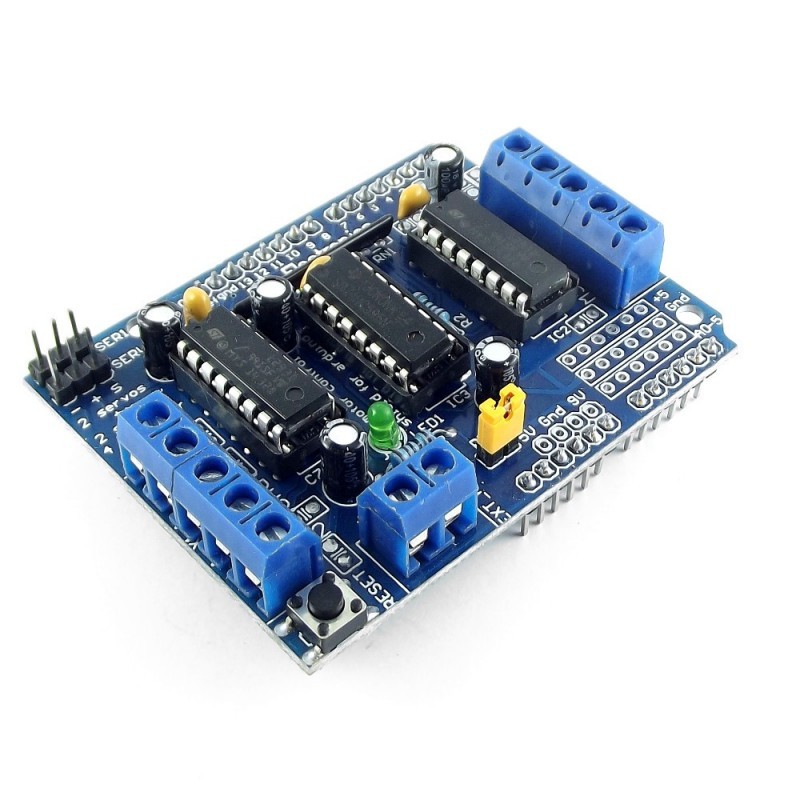
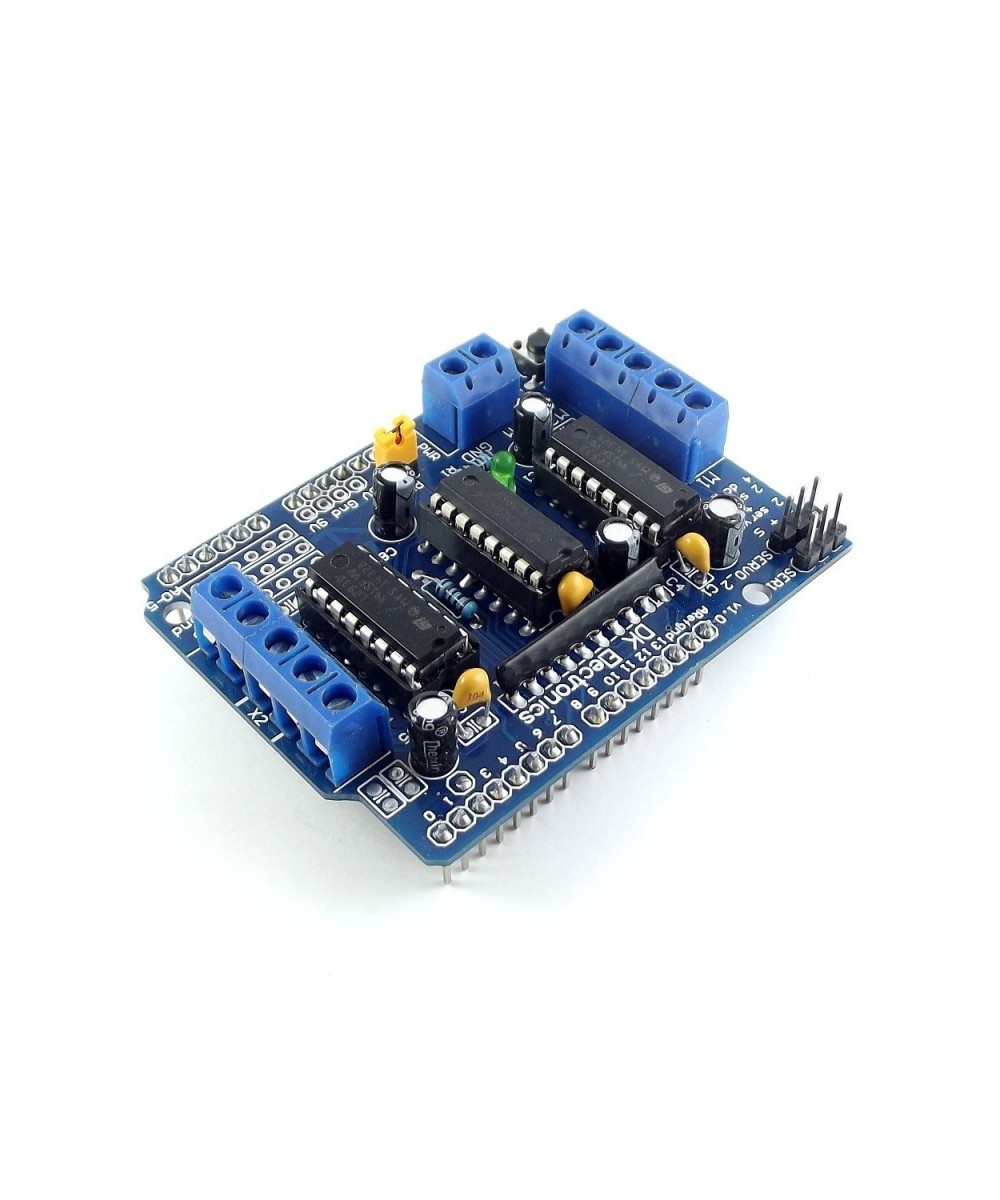
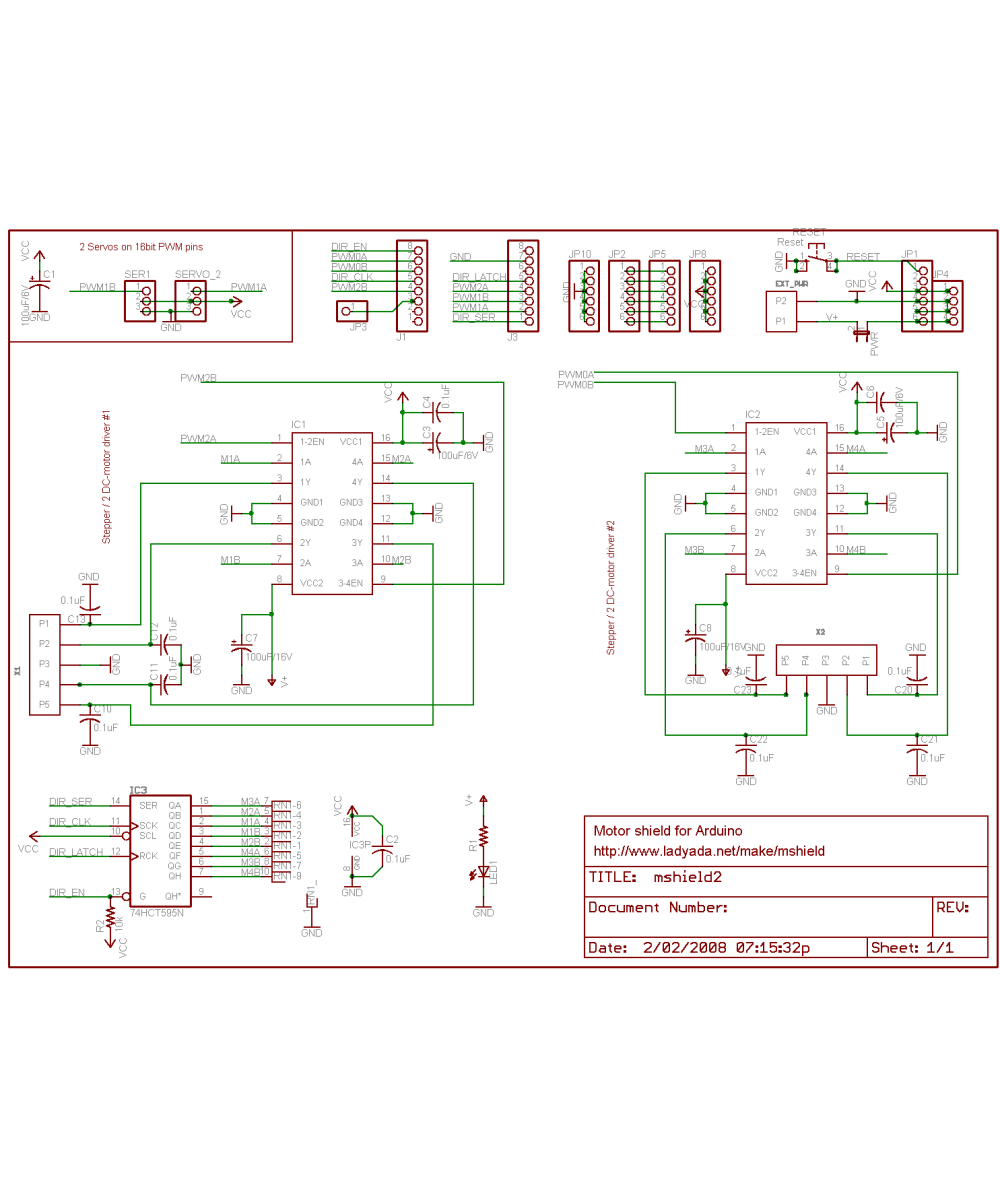
El Shield Motor Driver L293D fue diseñado por Adafruit para facilitar el control de motores con Arduino. El shield facilita el control de hasta 4 motores DC o 2 motores paso a paso unipolares o bipolares y 2 servomotores pequeños (SG90 o MG90). Posee dos drivers puente H L293D manejados por un Chip conversor serial a paralelo 74HC595, reduciendo notablemente el uso de pines de Arduino. El Shield es compatible con Arduino Uno, Mega y Leonardo.
El conversor 74HC595 expande 4 pines (4,7,8,12) de Arduino a 8 pines necesarios para manejar la dirección de los drivers L293D. Las señales "Enable" de los drivers están conectadas directamente a pines PWM de Arduino (3,5,6,11), permitiendo controlar la velocidad de los motores.
El Shield motor L293D soporta:
- 4 Motores DC bidireccionales (con control de velocidad individual) ó
- 2 Motores Paso a Paso (unipolares o bipolares)
- 2 conexiones para servomotores (SG90 o MG90S)
Especificaciones:
- Voltaje de potencia (motores): 4.5V-24V DC
- Corriente DC por canal: 600mA
- Corriente pico por canal: 1.2A
- Incorpora 2 circuitos integrados L293D proporcionando 4 puentes-H completos
- Protección contra sobre carga térmica
- Diodos de protección internos contra voltajes inversos generados por las cargas inductivas
- 4 canales (M1, M2, M3 y M4) para controlar igual número de cargas inductivas como motores DC ó 2 motores paso a paso unipolares o bipolares de entre 4.5 V y 24 V
- Permite controlar tanto la velocidad como la dirección de giro de los motores
- Control de velocidad de motores DC con resolución de 8 bits (PWM)
- Control de motores paso a paso con 1 y 2 bobinas en modo simple, doble (mayor torque) e intercalado (medio paso)
- 2 conectores independientes para controlar 2 servos pequeños de 5 V (Pines digitales 9 y 10)
- Corriente máxima continua en cada una de las salidas M1, M2, M3 y M4: 600 mA (0.6 A)
- Corriente máxima pico no repetitivo en cada una de las salidas M1, M2, M3 y M4: 1.2 A
- Resistores de pull-down que mantienen los motores deshabilitados durante el encendido
- Requiere fuente externa para la alimentación de las cargas en las salidas M1, M2, M3 y M4.
- Se puede elegir alimentar el Arduino con la misma fuente de los motores o por separado mediante el Jumper "PWR"
- Borneras para alimentación externa (+M, GND)
- Conectores para los pines Analógicos
- Pulsador de Reset
- Led indicador de alimentación de fuente de motores
- Dimensiones: 6.8cm x 5.5cm x 2cm
Recomendaciones:
Las salidas para los servos toman su alimentación directamente de los 5V de la placa Arduino, por lo que esta bien utilizar servos pequeños como los SG90 o MG90S. Si necesita utilizar servos con un mayor consumo de corriente, se recomienda cortar la pista de cobre de alimentación V+ en el shield o el cable positivo del servo y alimentar por separado (No olvidar conectar las tierras).
La alimentación de las 4 salidas para motores u otras cargas inductivas M1, M2, M3 y M4 se tiene que suministrar con una fuente externa. Se puede proveer del jack DC del Arduino (Pin Vin) o del conector de tornillo "EXT_PWR" en la shield; seleccionable mediante el jumper "PWR" (Si el jumper está colocado se utiliza fuente externa del Arduino conectada al jack DC, y si no está colocado se utiliza el conector de tornillo de la shield). Si utiliza el jumper y selecciona la fuente externa tenga en cuenta la polaridad, ya que esta entrada no cuenta con diodo de protección de polaridad y una conexión incorrecta resultará en el daño del shield y la placa Arduino. Tampoco conectar la salida regulada de 5V ó 3.3V de la placa Arduino a esta entrada.
En cualquier caso la corriente de la fuente externa de voltaje debe ser superior al consumo máximo de las cargas (motores), se recomienda una fuente de 7-9V con capacidad de entregar 2 amperios mínimo.
Se pueden controlar motores de 4.5 V a 25 V. Si provee alimentación con fuente externa conectada a la placa Arduino. El voltaje máximo recomendado que admite esta entrada en Arduino Uno por ej. debe ir de 6 V a 12 V, por lo que podrá controlar motores solo de 4.5 V hasta 10 V aprox. según el voltaje de la fuente.
PINOUT:
Arduino 4 - DIR_CLK
Arduino 7 - DIR_EN
Arduino 8 - DIR_SER
Arduino 12 - DIR_LATCH
Arduino 11 - PWM_Motor1
Arduino 3 - PWM_Motor2
Arduino 6 - PWM_Motor3
Arduino 5 - PWM_Motor4
Arduino 9 - Servo_1
Arduino 10 - Servo_2
Enlaces de interés:
Tutorial Control Motor Paso a paso
Contenido:
1 x Shield L293D control de motor para arduino
Referencias específicas
Sensor de presion nivel de liquidos rs485
Sensor de sismos 3 ejes D7S-A0001
Sensor de presión absoluta MPXHZ6400A MPXHZ6400AC6T1 Semiconductor
controlador de velocidad de motor para drone
Buzzer electrónico 12V con luz indicadora BJ-3
Sensor de monitoreo ambiental ideal para aplicaciones de Drones e Internet de las Cosas (IoT)
Agrega comunicación inalámbrica a tu proyecto con este módulo Bluetooth esclavo / maestro.
Sensor de velocidad infrarrojo 4 pines
Este detector permite saber si una puerta o ventana esta abierto o cerrado.
Sensor Radar para medir velocidad de objetos en movimieto usando el efecto doppler
M12 NPN NO sensor de láser / corrector fotoeléctrico infrarrojo Radio
CJMCU-2516 Módulo de memoria W25Q16BVSIG Serial SPI Flash 16M-BIT
Peso electrónico de la balanza de la carga de la plataforma de la balanza de la plataforma de la balanza 200kg
LLAVERO RFID REGRABABLE 13.56MHZ
Sensor de Flujo de Agua YF-S401 Caudalímetro 0.3-6L/min
Fuente de energia conmutada de 12V de 1A a 20A.
*NOTA: Algunas fuentes de energía incluyen un potenciómetro para ajustar el mínimo de voltaje de salida. No regularlo a un voltaje mayor a 1V, de lo contrario el equipo se puede dañar.
Contenedor para baterías 18650 2 espacios con interruptor y tapa
Arduino Mega 2560 R3 es una tarjeta de desarrollo mucho mas potente que el Arduino Uno, utiliza el microcontrolador ATmega2560. Posee 54 entradas/salidas digitales (15 pueden usarse como PWM), 16 entradas analógicas, 4 UARTs(puertos seriales por hardware)
Cargador de batería recargable de litio 18650, 16340, 14500 de 3,7V
Con este modulo podras conectrolar dos direcciones de tu robot, ademas de un pulsador para activar o desactivar algo.
faja de datos gris de 2 metro con paso de 1,27 mm
Tapas de puente negras de 2,54 mm Placa de circuito estándar Tapa de puente Derivaciones Bloques de pines de conexión de cortocircuito
Polea para codificador rotatorio 80mm