














Características:
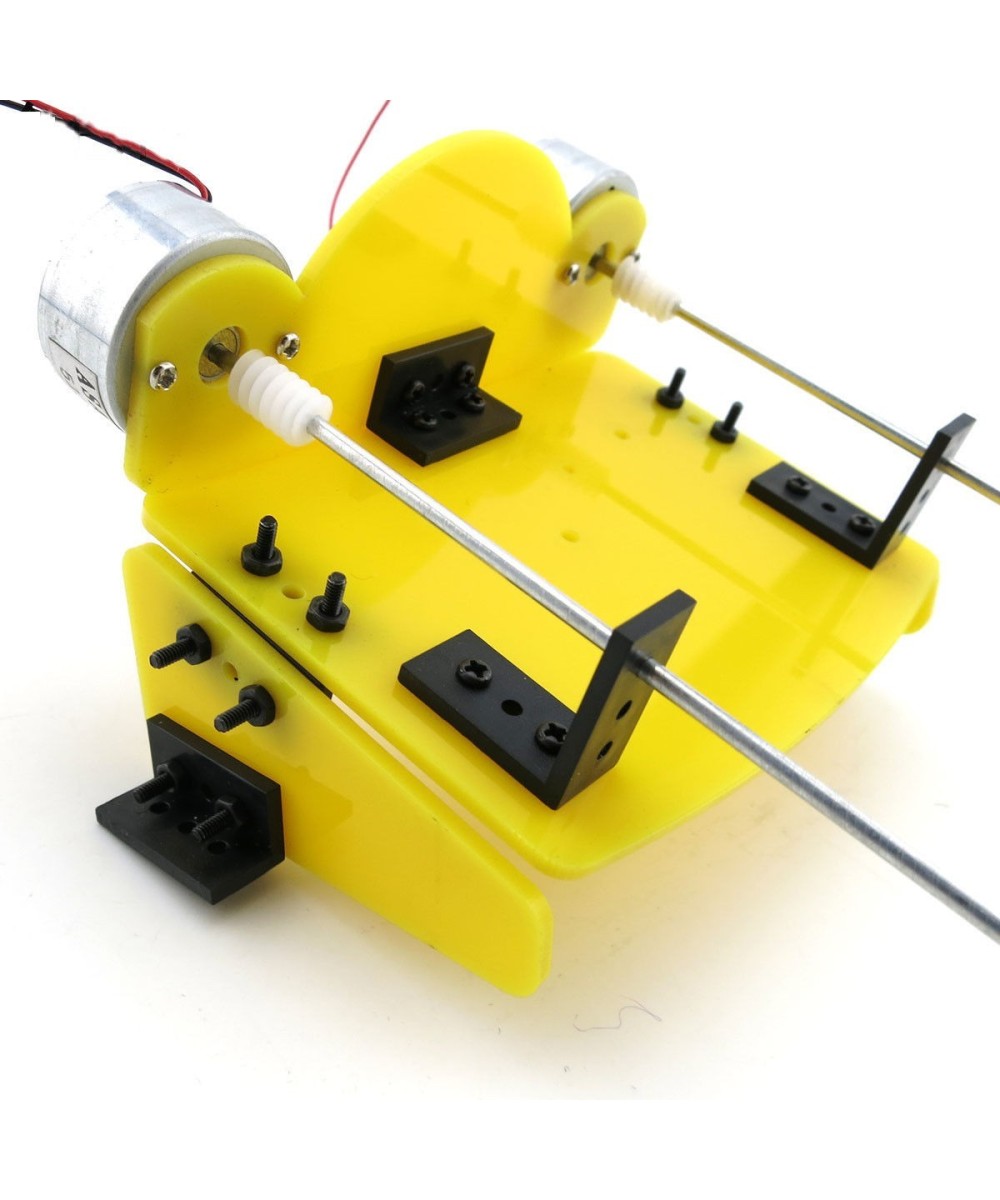
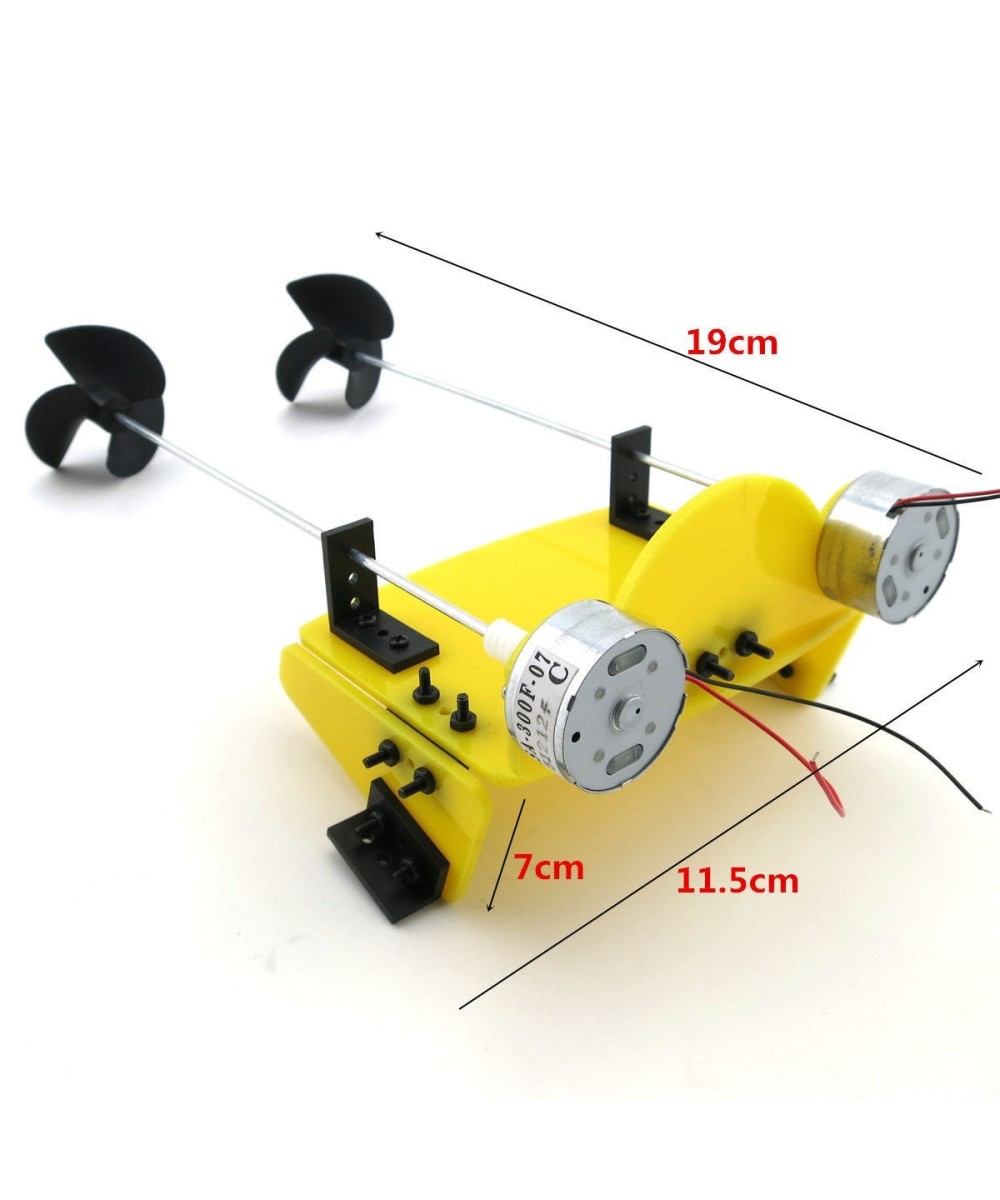
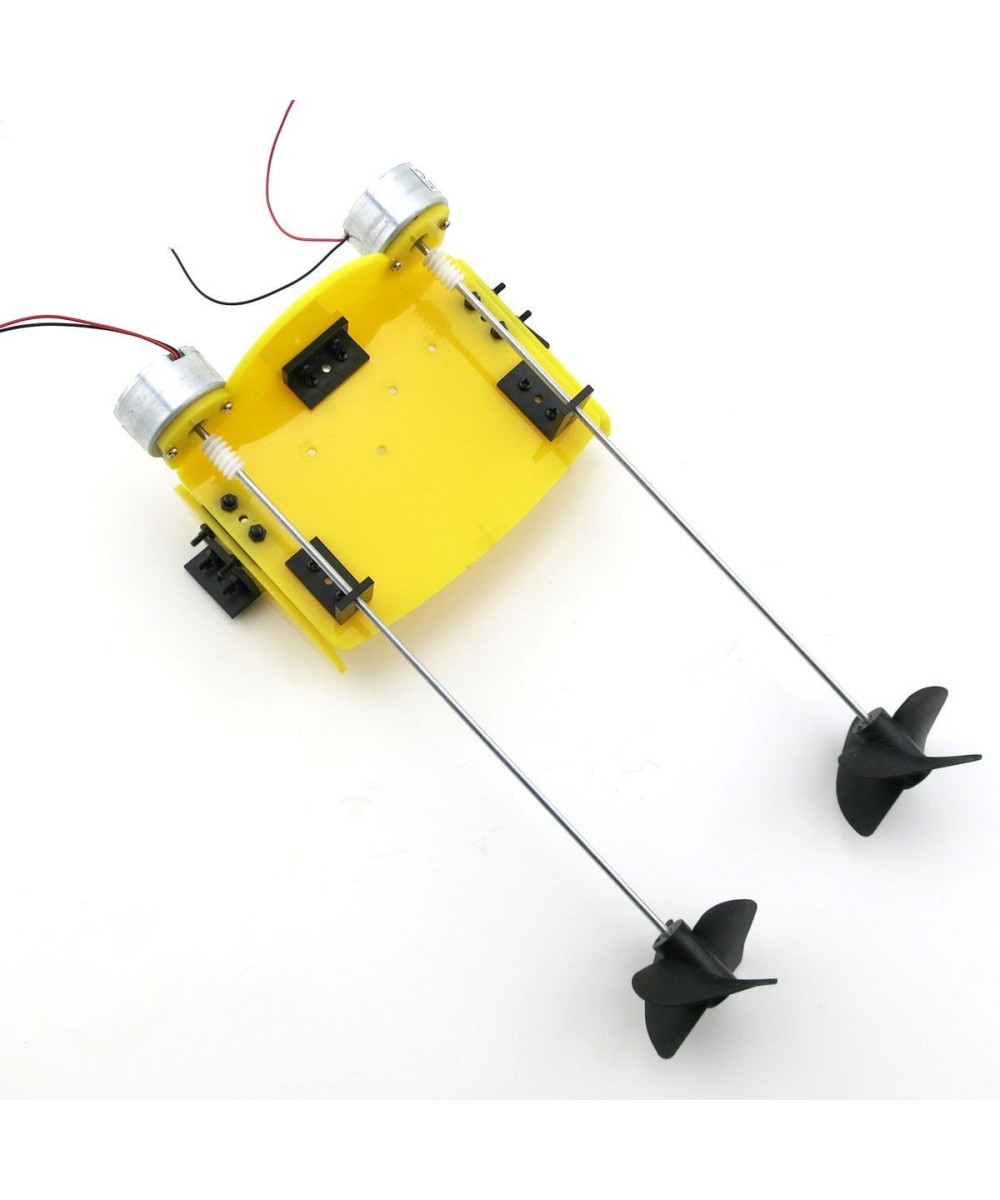
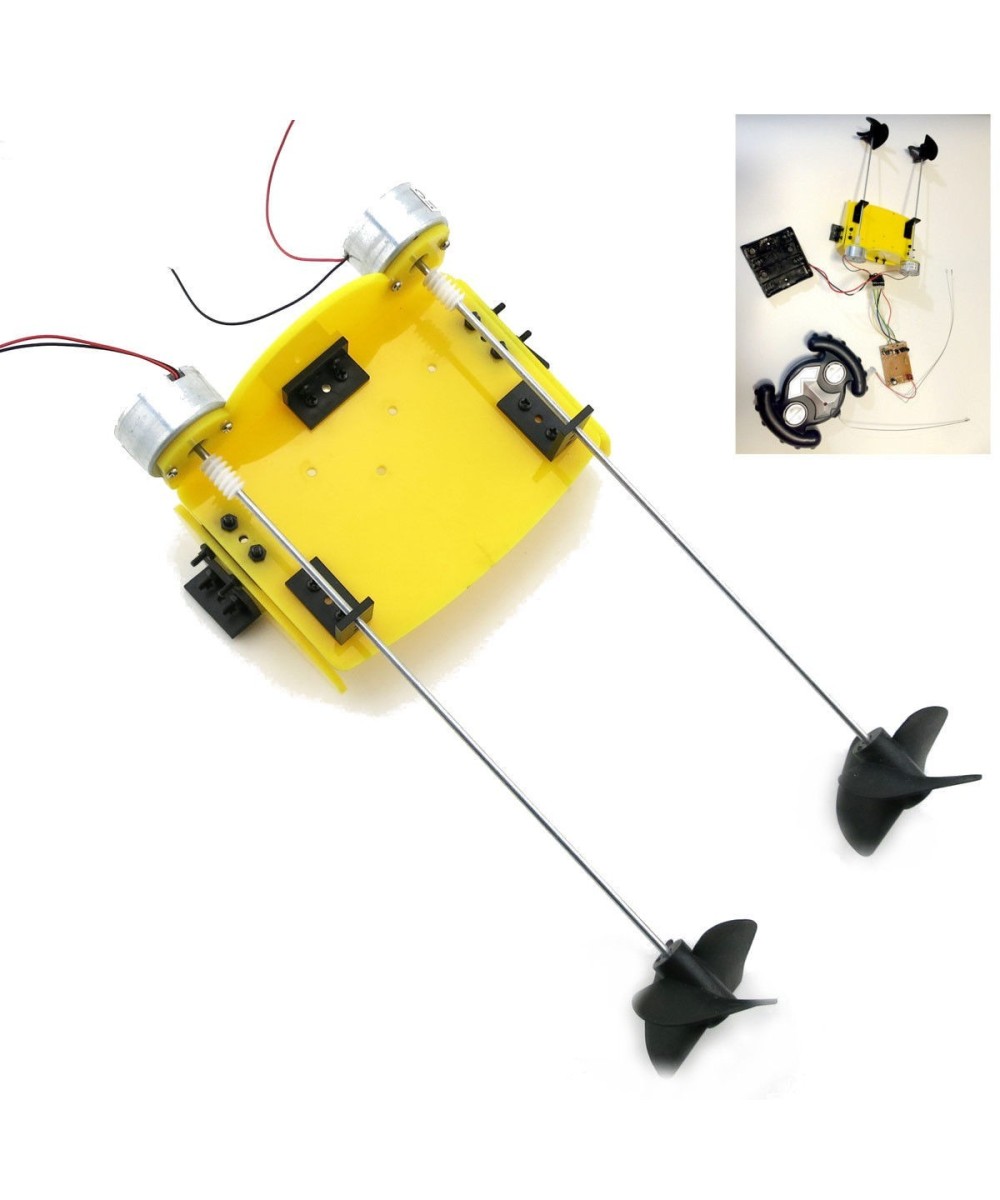
Motor eléctrico / hélice duales unidos al cuadro.
Material: plástico y metal.
Tensión del motor: fuente de alimentación de 3V para cada motor (con una caja de batería de 3 o 4 celdas).
Tipo de combustible compatible: eléctrico.
Color amarillo.
Dimensiones: Longitud 19 cm, Ancho 11.5 cm, Altura 7 cm.
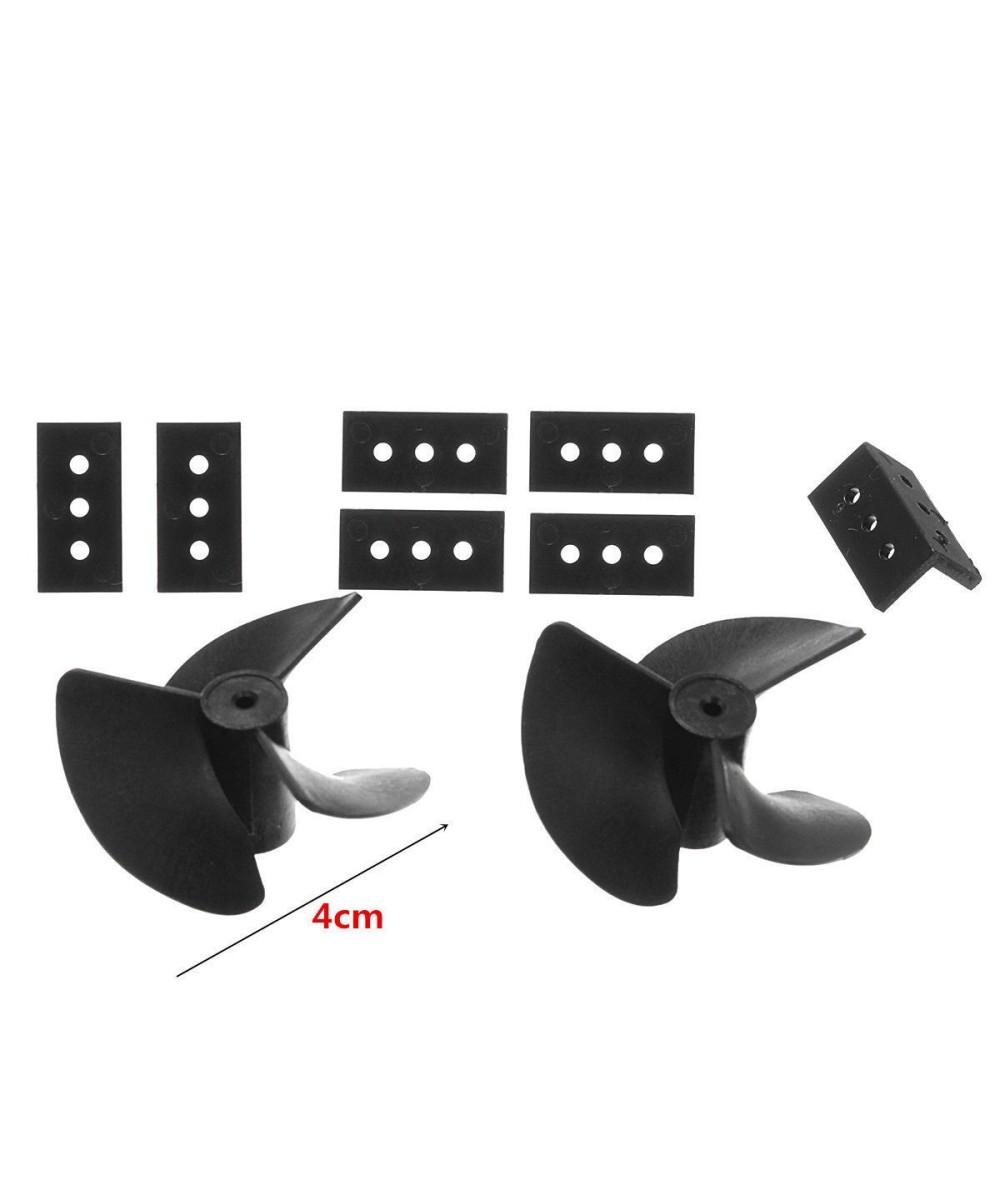
Tamaños de paletas: 40 mm, eje de transmisión 150 mm.
1 cm = 0.39 pulgadas
Incluye:
1x Chasis para barco RC con motores.
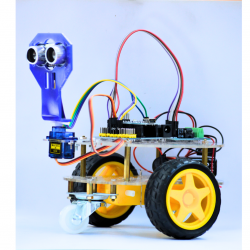
Carrito Redondo Evasor de Obstáculos
Microscopio digital BA-006 BAKU
Sistema de Eje Delantero de Coche con Servo ZX2 (DIY)
Proyecto educativo Radar infrarrojo (Hazlo tu mismo DIY)
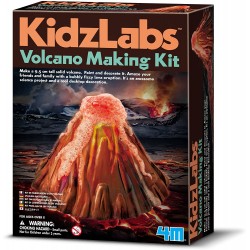
KidzLabs Volcán Laboratrio Geología-Química DIY
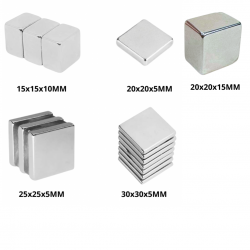
Experimento acelerador magnético de 6 bobinas de cobre.
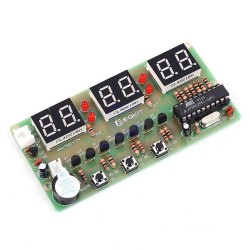
Proyecto de electrónica balanza de precisión DIY
Grillo Robot con panel solar
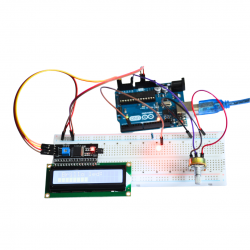
Proyecto control de brillo led arduino y LCD I2C
Cuchillo interruptor.
15 DOF Robot humanoide / Caminata / danza / robot bípedo bloques de construcción de metal robot para caminar bípedo / estructura metálica
Carrito robot de 3 ruedas pequeño.
Explora las maravillas del espacio exterior con el Planetario del Sistema Solar 4M. Junta el sol y los planetas y ponlos en movimiento con este fascinante mini planetario que brilla en la oscuridad.
Motor con caja reductora 12V 35RPM
Mini motor con caja plástica de engranajes
Arduino Mega 2560 R3 es una tarjeta de desarrollo mucho mas potente que el Arduino Uno, utiliza el microcontrolador ATmega2560. Posee 54 entradas/salidas digitales (15 pueden usarse como PWM), 16 entradas analógicas, 4 UARTs(puertos seriales por hardware)
Regulador / Estabilizador descendente USB 9 / 12 / 24 a 5V 3A
Gancho magnético con imán plano de 20mm
Aspas tipo trébol de 3 hojas 70mm (par)
Chasis para barco RC con motores para que se puedda impulsar.